


产品参数
| No. | 模块 | 功能简述 |
| 1 | Modbus模块 | 该模块允许使用者通过标准Modbus-TCP协议与优傲机器人建立连接。通过该连接使用者可以获取优傲机器人的基本参数信息,包括机器人的关节信息、TCP坐标信息、IO信息等;同时使用者可以通过该连接对优傲机器人的输出信号和寄存器进行设置。 |
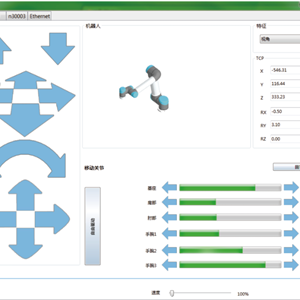
| 2 | 30003模块 |
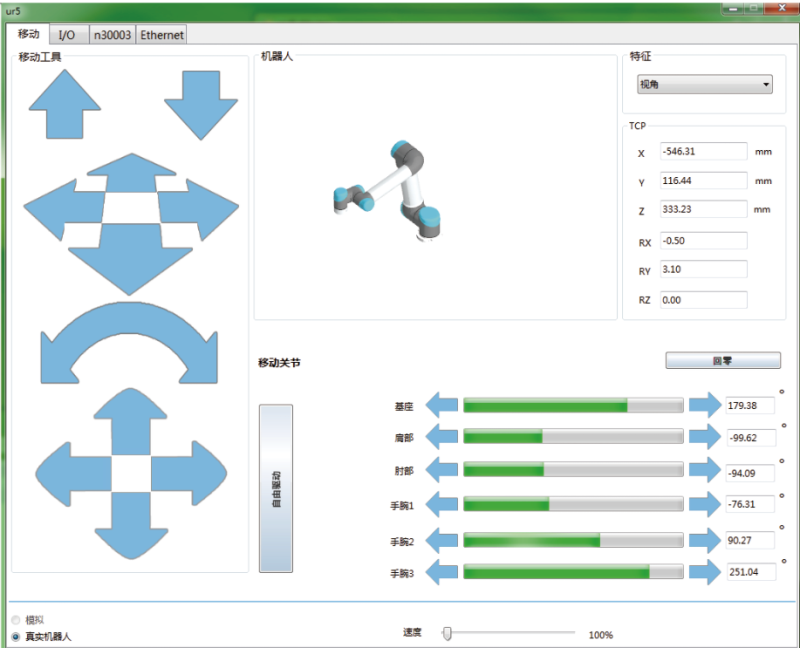
此模块允许使用者连接到优傲机器人的30003端口,从而获取优傲机器人的实时数据信息并且通过发送指令达到控制优傲机器人的目的。 备注:运动方法的参数如涉及到速度、加速度、弧度等,极限值请参考UR标准或示教器面板设定进行传入,否则可能导致设备无法正确的执行动作。 |
| 3 | Dashboard模块 | 该模块允许使用者连接到优傲机器人的Dashboard端口,通过该端口使用者可以向优傲机器人发送指令。 |
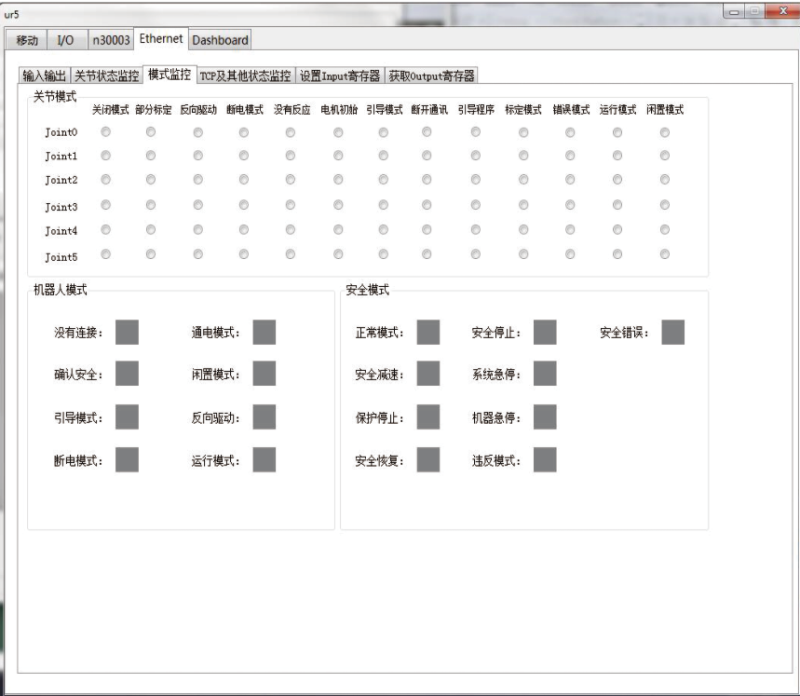
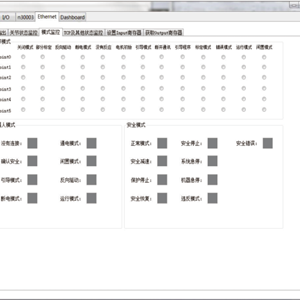
| 4 | Ethernet模块 | 该模块允许使用者通过EthernetIP协议连接优傲机器人,获取优傲机器人的基本参数信息和实时数据信息。同时可以通过EthernetIP协议设置机器人的输出信号和寄存器值等。 |
| 5 | Info模块 | 该模块允许通过调用方法获取并下载机器人的日志文件。日志文件会被保存在指定的路径下,在此路径下创建一个以下载日期时间命名的文件夹,日志文件会被保存在内。 |
| 6 | Log模块 | 该模块允许用通过调用方法获取机器人的序列号信息、机器人的系列、机器人的型号及安装配置信息。需要注意使用该模块功能必须现在电脑上安装WinRAR软件。 |
| 7 | Program模块 | 该模块允许通过调用方法获取并下载机器人的程序文件、安装配置文件以及变量文件。文件会被保存在指定的路径下。 |