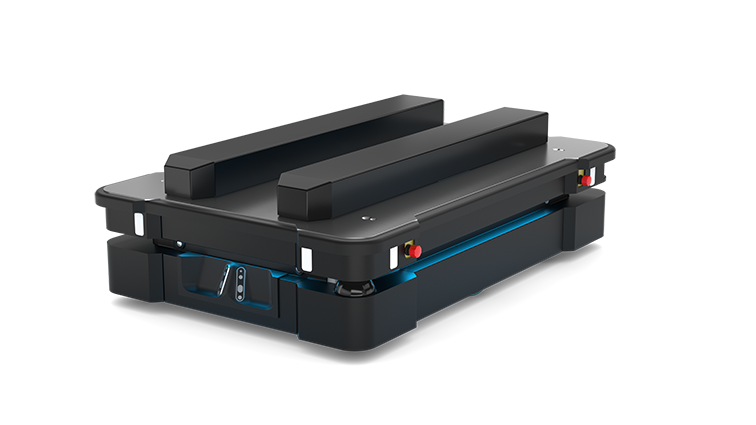









MiR1000
MiR1000 经设计可用来对重载和托盘的内部运输进行自动化和优化。其有效负载为 1,000 kg,是 MiR 最为强大的机器人。即使在高度动态的环境中,它也能在没有任何外部安全措施的情况下运输重型负载。
安全高效的导航实现优化物流
MiR1000 是一款协作和自主式机器人,能够安全地绕过各种障碍物。如果有人走到它的前面,它将及时安全停止。先进技术和专业软件使这款机器人能够自主导航并选择到达目的地的最有效路径。当遇到障碍物时,其能够自动绕过并重新调整路线,以避免材料交付的停止或延迟。
MiR1000 配备可提供 360 度扫描视角的最新激光扫描技术,可确保优化安全性。机器人前部的 3D 相机可以检测托盘且扫描范围为地面3cm至2m,每个角各有两个传感器,可确保机器人能够发现其通常很难发现的托盘和其他障碍物。
自动化托盘运输
MiR1000 可以与 MiR 生产的托盘举升器一起部署,并能够自动拾取、运输和交付托盘。这意味着,协作式机器人可代替传统的叉车和卡车。而且,很多企业都因为叉车和卡车经常带来安全风险,而希望将其从生产车间中移除。与此同时,与传统托盘举升器不同,MiR 1000 无需人工操作,因此优化了托盘的运输,使员工能够腾出时间去做更有价值的工作。
因灵活性和用户友好性而兼容众多应用程序
操作方便的 MIR1000 使您能够一开始就能得心应手地操作。您可在智能手机、平板电脑或计算机上通过直观的 MiR 机器人界面控制 MiR1000,并能够在先前没有编程经验的情况下对其进行编程。该款机器人能够集成至 ERP 系统中,为您打造全自动解决方案。该款机器人还能与其他型号的机器人一起加入 MIRFleet 之中,使不同的机器人能够在同一车队中接受控制。
根据您的需求,您可以轻松地通过托盘举升器、传送带、机器人手臂或其他应用程序来更换 MIR1000 顶部模块。
为工业应用打造的稳健机器人
MiR1000 满足 ISO/EN 13849 标准,并符合针对重型及轻型工业环境的 EMC 要求。功能强悍的 MiR1000 机器人专为工业应用而设计,其外壳坚固,可承受掉落货物的撞击。
| 指定用途 | 为工业及物流应用打造的重型负载及托盘内部运输解决方案 |
| 类型 | 自主移动机器人 (AMR) |
| 颜色 | RAL 9005 / 乌黑色 |
| 护盖材料 | 侧盖:钢,粉末涂层。顶盖:铝,阳极氧化 |
| 产品设计寿命 | 5 年或 20 000 小时,以先到者为准 |
| 免责声明 | 相关规格可能因当地条件和应用设置的不同而有所不同 |
| 长度 | 1 350 mm | 53.1 in |
| 宽度 | 910 mm | 35.8 in |
| 高度 | 322 mm | 12.7 in |
| 重量 | 231 kg | 509 lbs |
| 离地净高 | 40 mm | 1.6 in |
| 负载表面 | 1 249 x 789 mm | 49.2 in x 31 in |
| 轮直径(驱动轮) | 200 mm | 7.9 in |
| 轮直径(脚轮) | 100 mm | 3.9 in |
| 安装顶部模块的尺寸 | 等于机器人占地面积。如果需要更大的顶部模块,请联系 MiR。 |
| 最大有效载荷 | 1 000 kg | 2200 lbs |
| 有效载荷的占地面积 | 等于机器人占地面积。如果需要更大的有效载荷占地面积,请联系 MiR。 |
| 安装 MiR EU-/US-/货架举升器时的最大举升能力 | 1 000 kg | 2 200 lbs |
| 最大速度 | 1.2 m/s (4.3 km/h) | 3.9 ft/s (2.7 mph) |
| 工作走廊宽度 | 具有默认占地面积:2100 mm | 82.7 in |
| 转动宽度 |
使用默认设置:2600 mm | 102.4 in 使用改进设置:2500 mm | 98.4 in |
| 充电器之间的最小距离 | 750 mm | 29.5 in,前提是机器人能够与墙壁成 80—100° 角度靠近充电器 |
| 不带有效载荷时的有效操作时间 | 15 h |
| 待机时间(机器人开启且空闲) | 26 h (100—0 %) |
| 电池类型 | 锂电池 |
| 有线充电器的充电时间 |
10%—90%:2 h(使用 20 A 充电器) 3.5 h(使用 12 A 充电器) |
| 充电选项 | MiR Charge 48V、电池充电器 48V 12A 和有线充电器 Lite 48V 3A |
| 充电器通信 | 机器人通过一个 CAN 接口与 MiR Charge 48V 进行通信。仅在机器人连接存在时,才会开始充电 |
| 充电电流, MiR Charge 48V | 最高 40 A,取决于临近充电周期结束时的电池温度和恒定电压下降。最高 35 A,取决于临近充电周期结束时的电池温度和恒定电压下降。 |
| 充电电流,有线充电器 | 12 A 或 3 A |
| 电池重量 | 14.3 kg | 31 lbs |
| 电池尺寸 | 300 mm 长 × 300 mm 宽 × 107 mm 高 | 11.8 in 长 × 11.8 in 宽 × 4.2 in 高 |
| 电池电压 | 48 V 额定电压 |
| 电池容量 | 2 kWh(48 V 时为 41.6 Ah) |
| 为空电池充电 | 仅可使用有线充电器。若要连接至 MiR Charge 48V,机器人至少需要具有 3%(或相当于运行 10 min)的电池容量。 |
| 有线充电器 | 在使用有线充电器充电时,机器人会进入急停状态。 |
| 环境 | 仅室内使用 |
| 操作环境温度范围 | 5°C—40°C | 41°F—104°F,符合 ISO3691-4 第 4.1.2 节 |
| 存储环境温度范围 | -10°C—60°C | 14°F—140°F |
| 湿度 | 10-95% 无冷凝 |
| IP 等级 | IP21 |
| 地面上的水迹 | 可以承受驾驶通过地面上最大深度为 4 mm 的小水坑。应对潮湿地面执行风险评估,否则制动距离可能会受到影响。 |
| EMC | EN61000-6-2、EN61000-6-4、(EN12895) |
| 工业车辆安全标准 | CE、EN1525、ANSI B56.5、ISO3691-4、RIA15.08、ISO13849-1 |
| 安全功能 | 五类安全功能,符合 ISO 13849-1。如果触发安全功能,MiR1000 将停止。 |
| 人员检测安全功能 | 当检测到障碍物或人与机器人距离过近时触发 |
| 急停 | 按下急停按钮触发 |
| 防超速 | 防止机器人行驶速度超出预定义的安全限制 |
| 机器人界面中的手动控制 | 基于令牌,用于访问手动控制的系统。机器人一次仅发出一个令牌。 |
| WiFi(路由器) | 2.4 GHz 802.11 g/n, 5 GHz 802.11 a/n/ac。内部计算机:802.11 a/b/g/n/ac。 |
| WiFi(内置 PC) | 双频无线 A/B/G/N/AC |
| WiFi 连接 | WiFi 适配器:2.4 Ghz 和 5 GHz,2 个内置天线。 |
| I/O 连接 | 4 个数字输入端口,4 个数字输出端口,1 个以太网端口 |
| 通讯协议 | REST,Modbus |
| 顶部模块的电源 | 48 V / 20 A, 48 V 安全电源 / 20 A 共享,24 V / 2A。 |
| SICK 安全激光扫描仪 | 双 microScan3(前后)为机器人提供 360° 视觉保护 |
| 3D 相机 |
2 台 Intel RealSense™ D435 3D 相机。 视场高度: 1 700 mm | 66.9 in 机器人前方的视场距离:950 mm | 37.4 in 视场水平角度:114° 机器人前方的视场最小距离(用于地面视图):250 mm | 9.8 in |
| 接近传感器 | 8 个 |
✓ 优化重型负载及托盘的内部运输,让您的员工能够专注于 更有价值的活动
✓ 既安全又高效,是传统叉车及托盘车的优选方案
✓ 极具灵活性,可配备定制的顶部模块以用于不同任务
✓ 即使在高度动态环境中也可安全高效地在人员和障碍物四周移动
✓ 无需对现有设施执行任何修改
✓ 使用界面极具友好性,无需任何技术经验
✓ 包含所有软件,不需要额外的 IT 基础设施