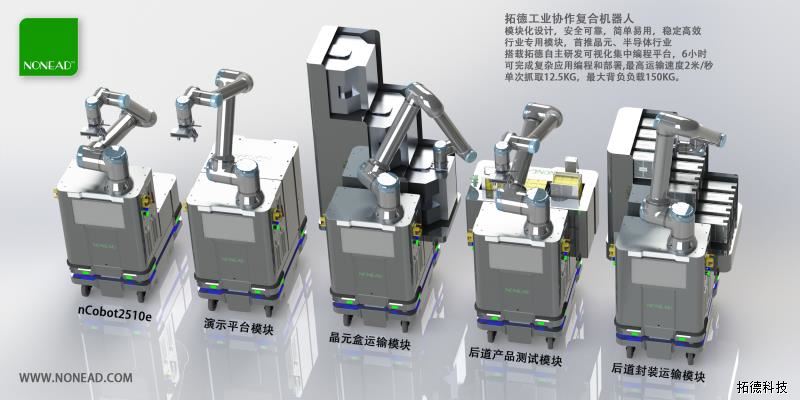


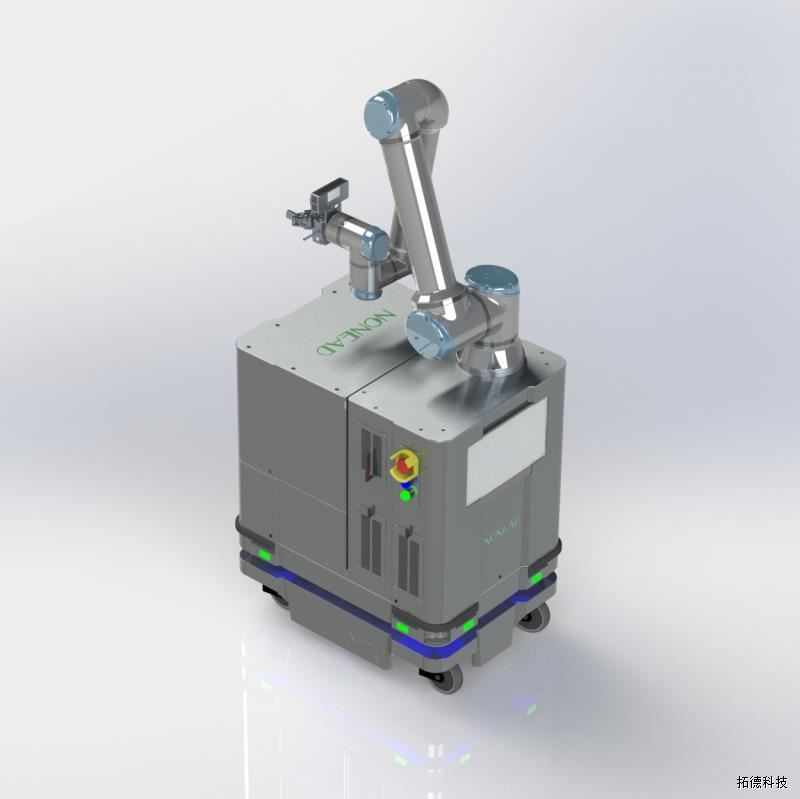
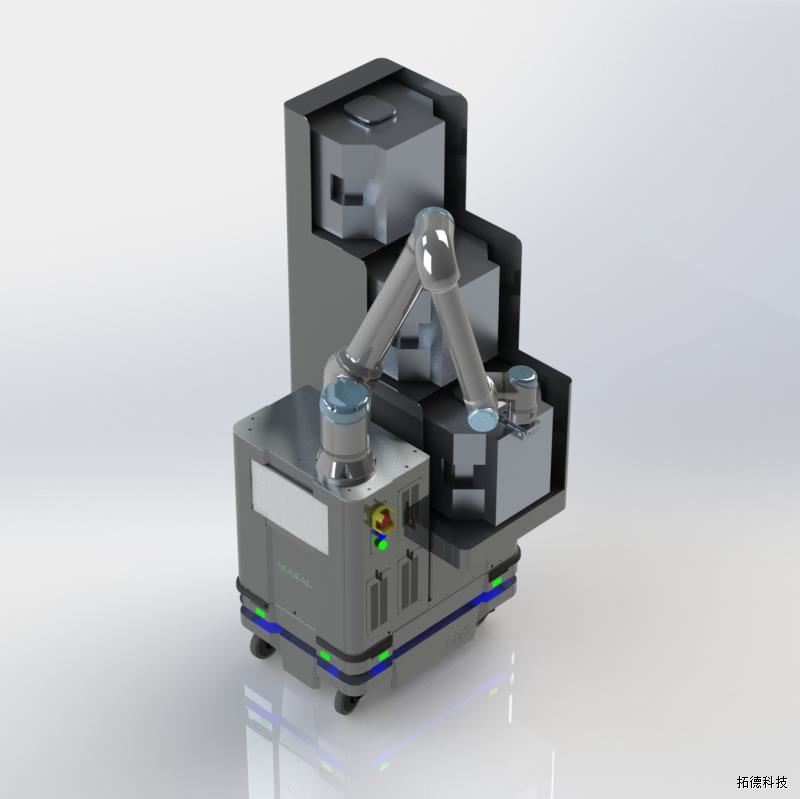
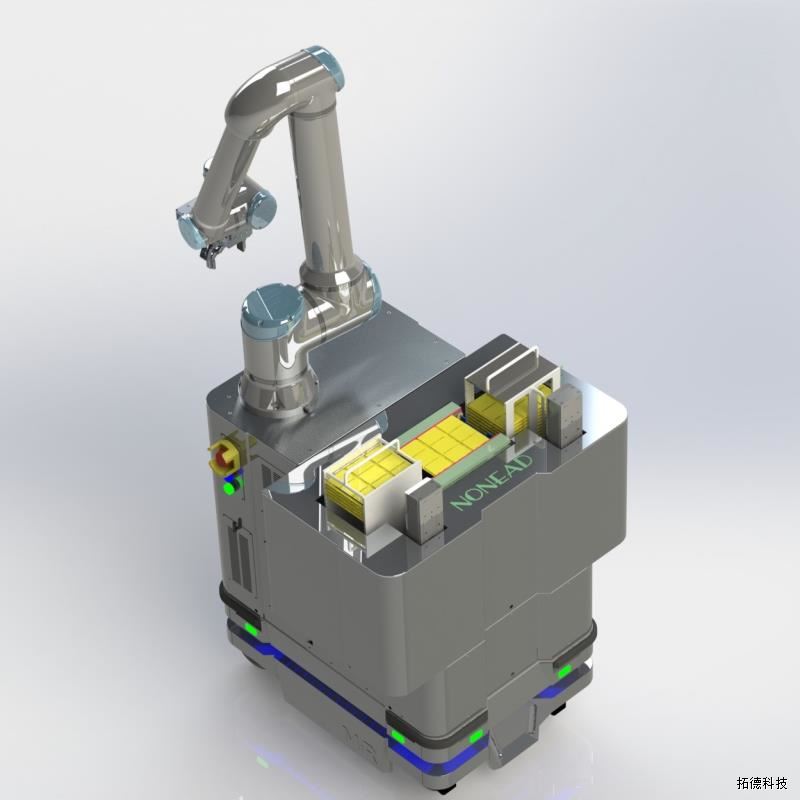
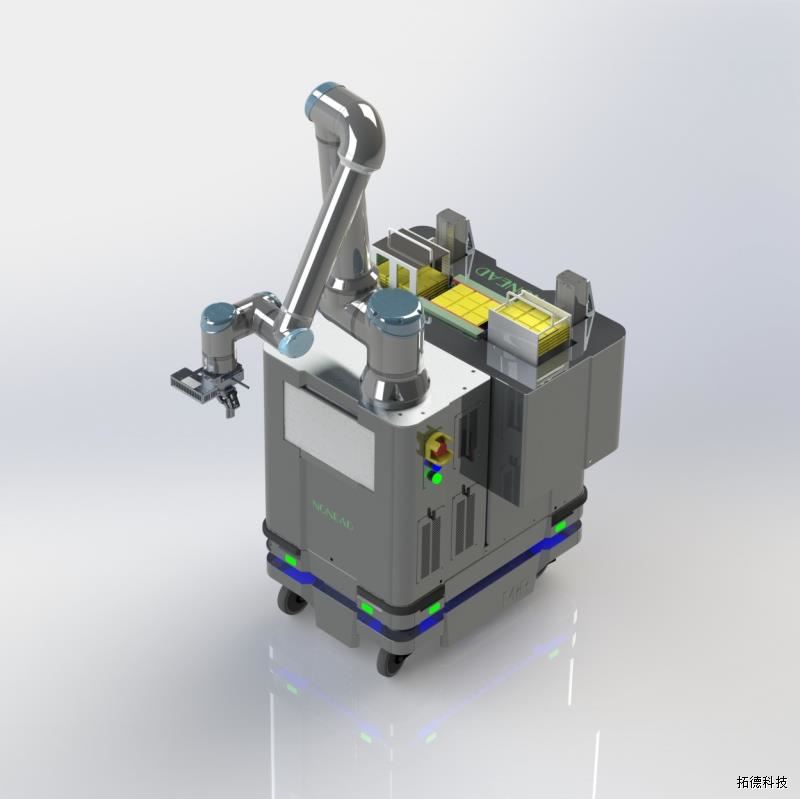
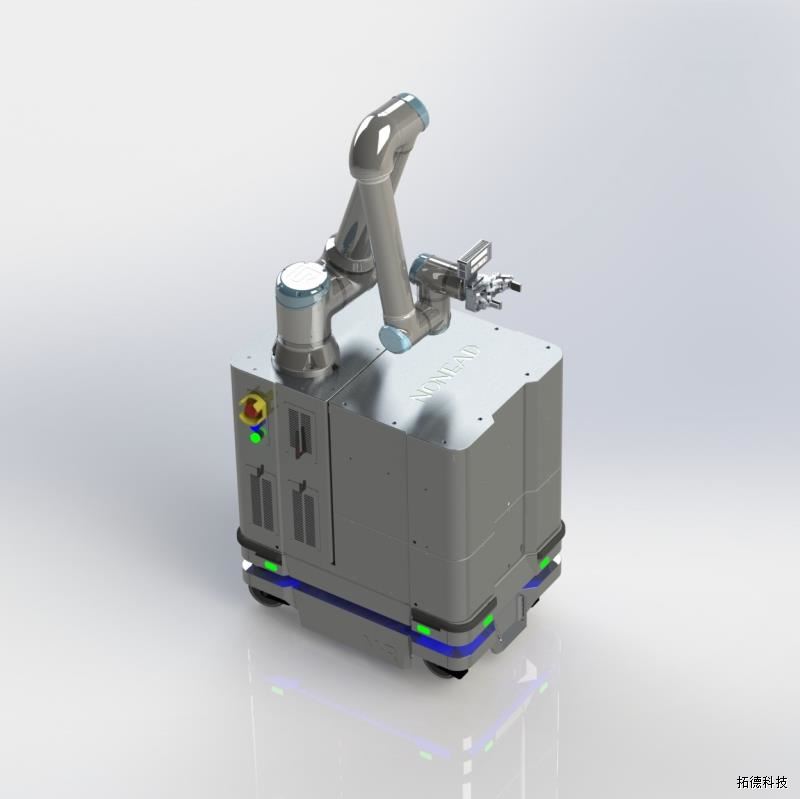
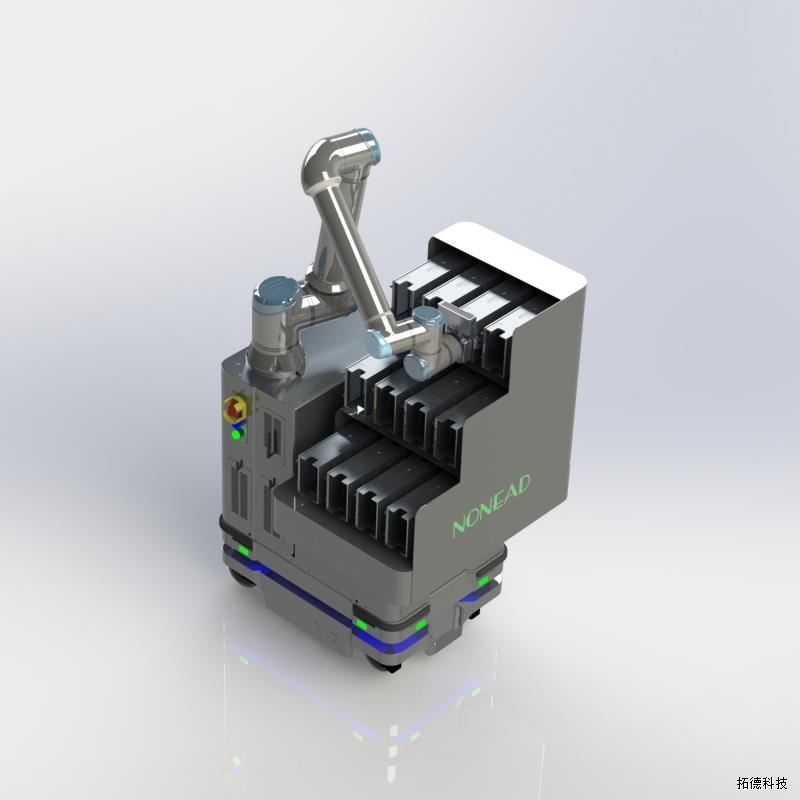





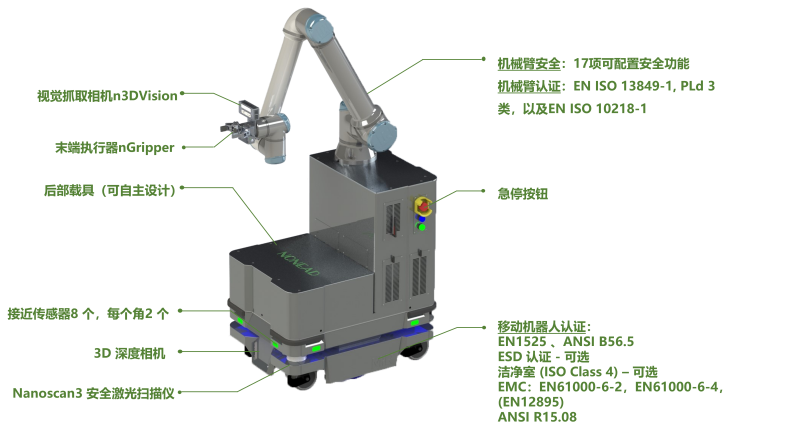
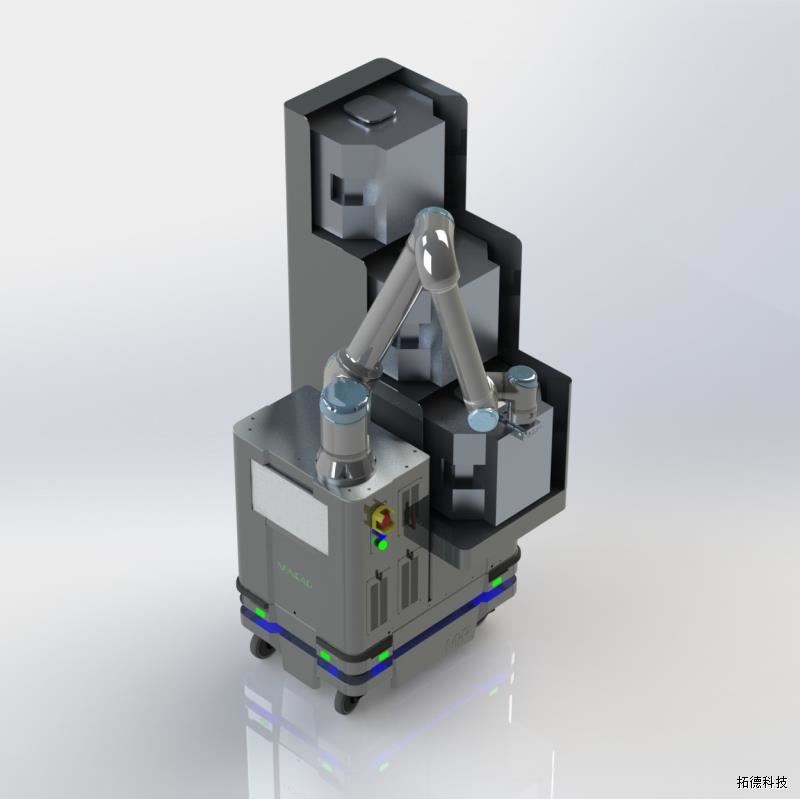
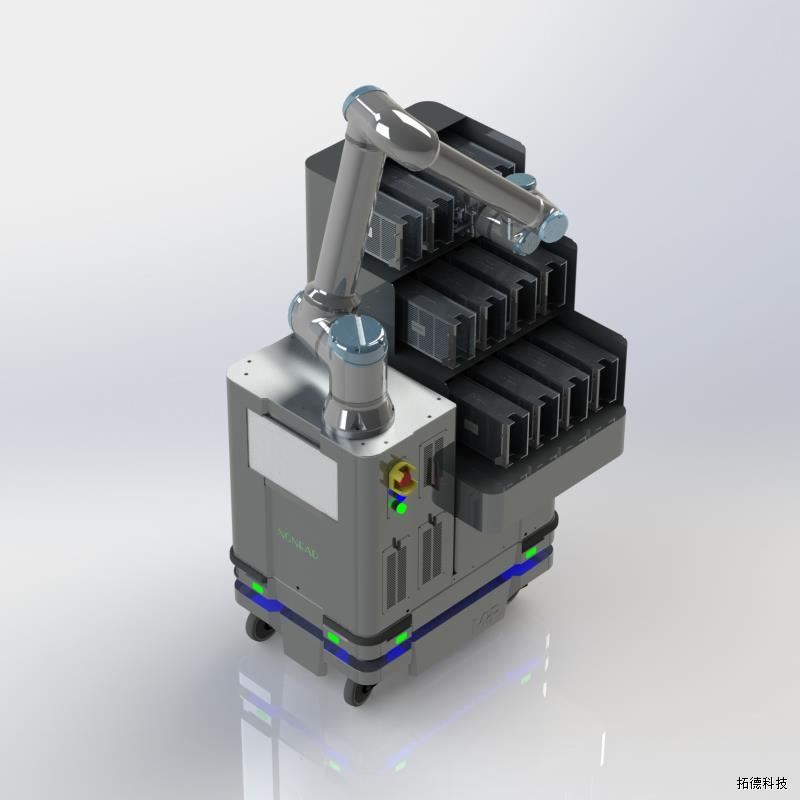
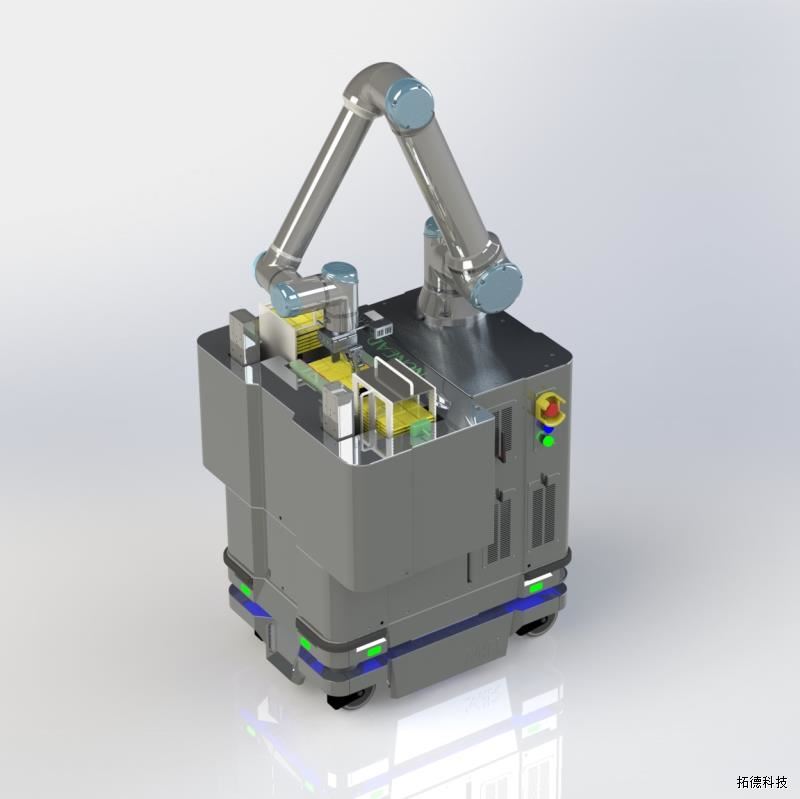
nCobot2510e是一款室内工业协作自主移动机器人,可以实现工厂内物料运输的自动化,提升内部物流速度,将员工从兼具重复性和危险性的运输工作中解放出来,从而确保员工和机器人安全高效工作,提高生产力。
NH0212_nCobot2510e_Limited_本体
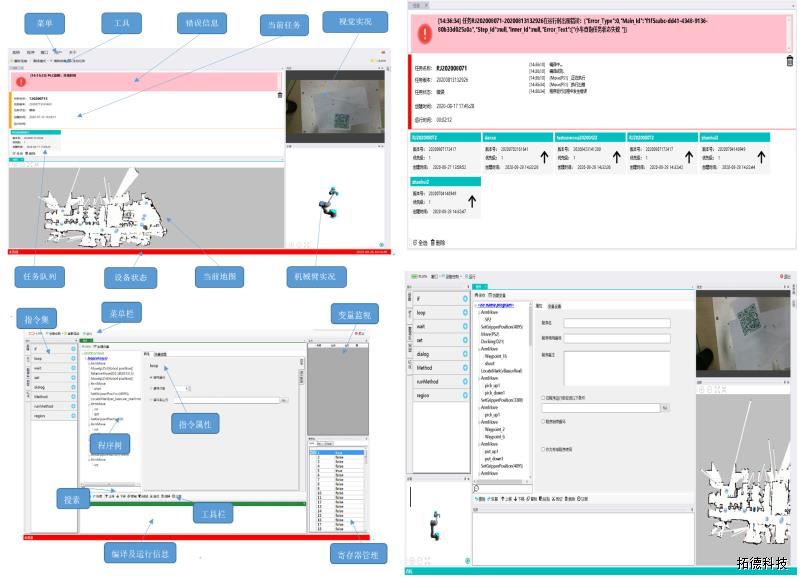
拓德科技自主研发工业协作复合机器人集中控制系统 nCobot V2
nCobot v2软件系统是用于控制nCobot v2系列产品的控制系统。本软件系统包含了对设备的基本参数配置、设备编程、程序管理、任务运行、用户管理等主要功能。
本系统支持多语言模式,用户可以根据自身需求对系统的语言进行切换。
本系统包含以下功能模块
系统模块 包含了系统设备的管理,系统状态的反馈及管控,基础数据的管理。
程序任务模块 包含了程序的创建、调试、编辑、导入导出等功能,任务的创建、运行、状态管理等功能。
用户模块 包含了用户的登录登出、修改密码、权限管控以及用户的创建、编辑等功能。
API模块 包含了一系列丰富的API提供用户使用,通过API可以实现任务的调度,设备及任务信息的查询以及设备信号的交互。
日志模块 包含了系统运行日志的查询及导出,任务运行日志的查询及导出功能。
异常处理模块 包含了对系统运行错误及程序任务运行错误的处理、恢复及管控等功能。
语言模块 包含了系统的多语言切换功能
提供丰富的 API接口,可供上位系统直接调用nCobot功能。
nCobot v2 API 提供标准开放接口,用于与上位MES,ERP或SAP进行数据通信,通过上位系统接受运行指令。
详见 nCobot V2用户手册 和 nCobot v2 API 用户手册
下载支持
第二代拓德工业协作复合机器人宣传册 中文版下载3D 模型 标准版3D模型 STEP 下载
nCobot V2 拓德工业协作复合机器人集中控制编程系统
NONEAD Call System 拓德复合机器人上位机呼叫调度系统
如何2小时完成一个应用 https://www.cobotchina.com/video_content/10596.html
效果演示视频
晶元行业,半导体行业,烟草行业,汽车零部件行业等
标准化调度及呼叫系统,提供API接口,也可通过MES模块进行二次开发
现已支持 SAP 、慧诚、致茂的MES系统,只需做简单客户化工作即可实现。
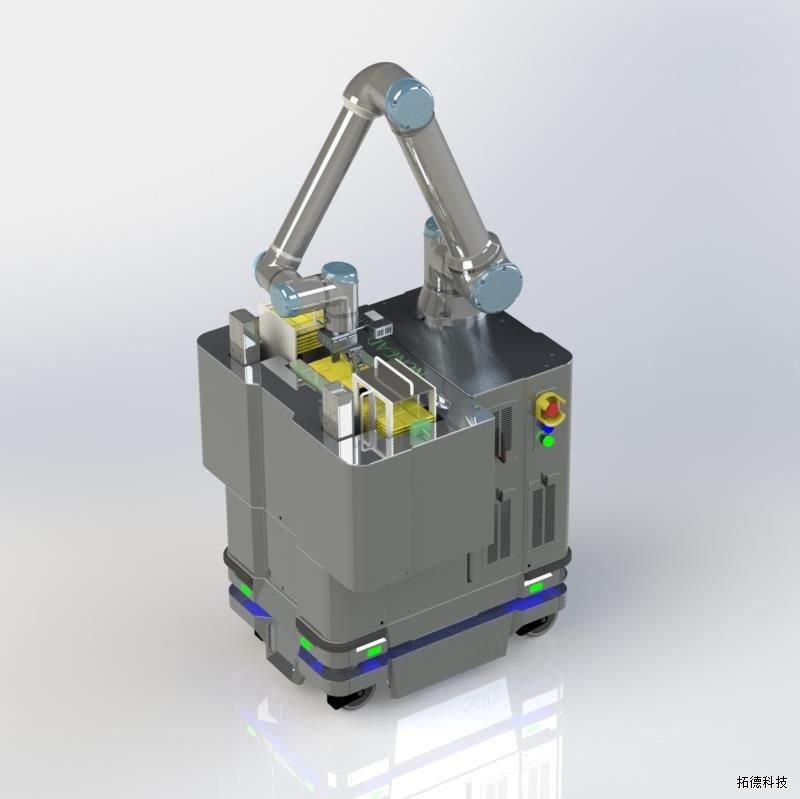
NH0213_nCobot2510e_Limited_载具模块一 平台载具 (不含NH0212)

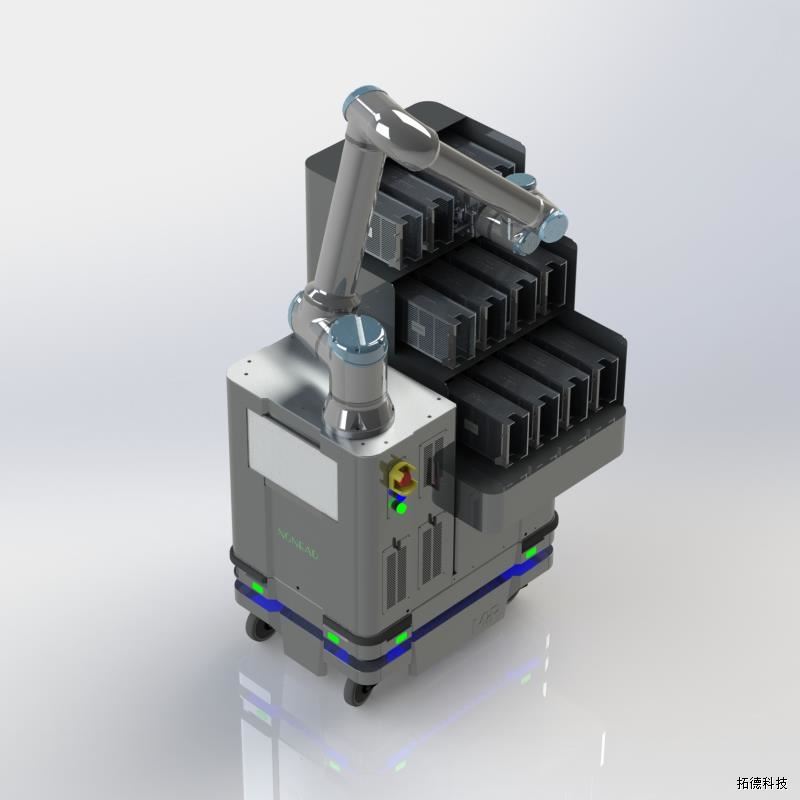
NH0214_nCobot2510e_Limited_载具模块二 晶元盒运输载具模块 (不含NH0212)
晶元盒运输载具模块用于晶元行业、半导体行业的晶元盒运输,支持4寸、6寸、8寸、12寸晶元盒,最多3盒12寸晶元盒,晶元盒含晶元重量需小于11KG,标准载具配合有无检测,震动抑制等装置,可加配RFID读取或条码读取装置,进行生产追溯。
NH0215_nCobot2510e_Limited_载具模块三 后道封装运输载具模块 (不含NH0212)
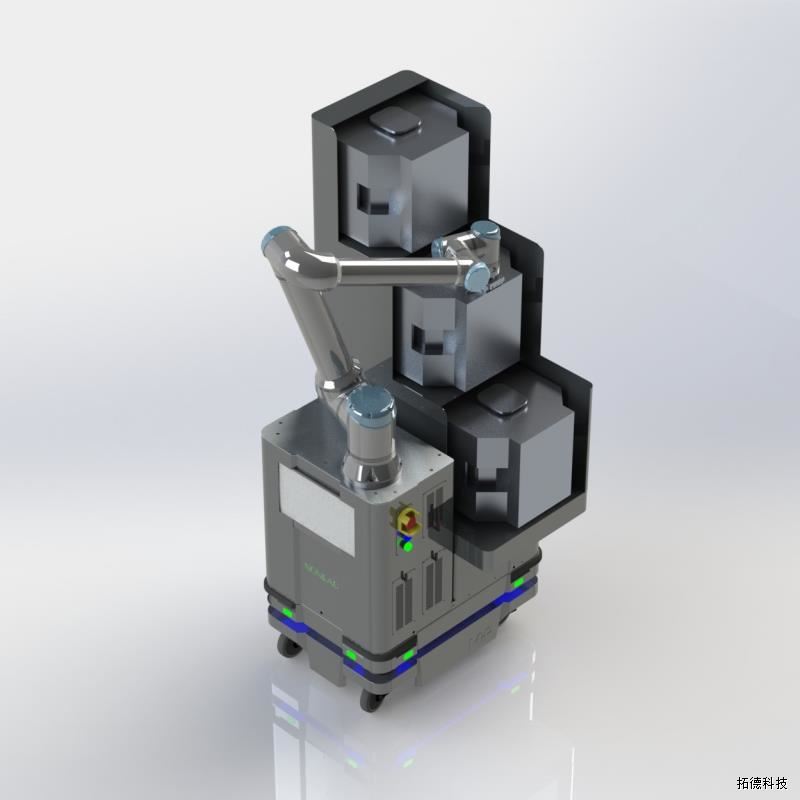
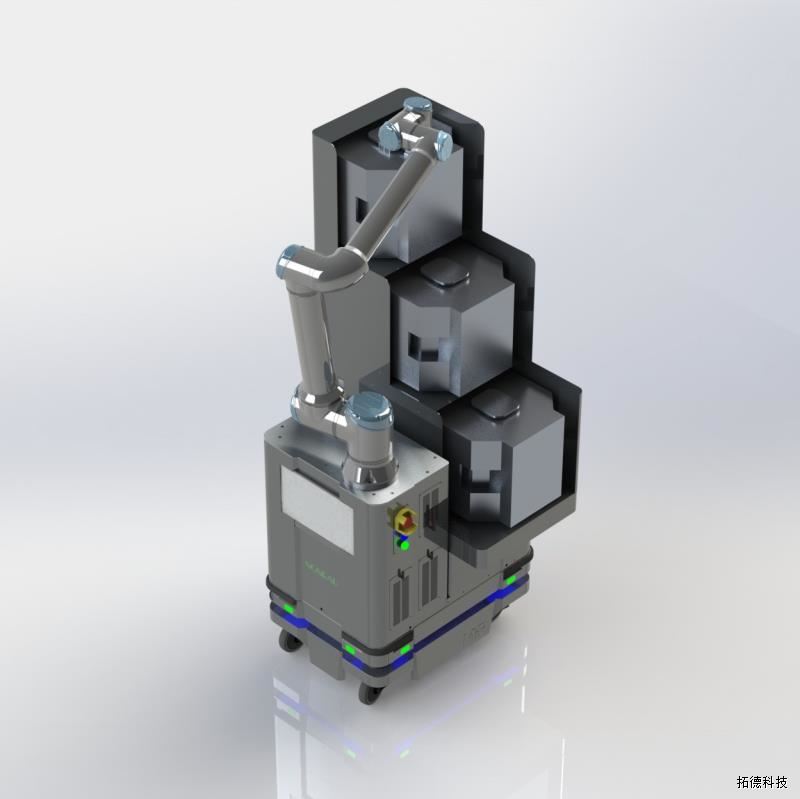
后道封装运输载具模块用于晶元行业、半导体行业的Magazine运输,通过工业协作六轴机器人将背负Magazine放入或取出生产设备,一次性可运输12盒Magazine,Magazine含产品重量需小于11KG,标准载具配合有无检测,震动抑制等装置,可加配RFID读取或条码读取装置,进行生产追溯。
NH0216_nCobot2510e_Limited_载具模块四 后道封装测试载具模块 (不含NH0212)
后道封装测试载具模块用于晶元行业、半导体行业的Magazine运输以及单片产品取放应用,背负载具设计有Input Magazine和 Output Magazine产品收板及出板自动化机构,工业协作机器人可直接将Input Magazine中的产品放入生产设备测试,同时可将测试完成的产品收回到Output Magazine,Magazine含产品重量需小于11KG,标准载具配合有无检测,震动抑制等装置,可加配RFID读取或条码读取装置,进行生产追溯。
技术参数
工业协作六轴机器人
标准型号
UR10e
Universal-Robots 110210
臂长
1300mm
自由度
6自由度
底座
运动范围
±360° 最快速度 ±120°/秒
肩部
运动范围
±360° 最快速度 ±120°/秒
肘部
运动范围
±360° 最快速度 ±180°/秒
手腕1
运动范围
±360° 最快速度 ±180°/秒
手腕2
运动范围
±360° 最快速度 ±180°/秒
手腕3
运动范围
±360° 最快速度 ±180°/秒
工具端速度
1米/秒
工具端力控
力
x-y-z 范围
100
N
力 x-y-z 解析度
2.0
N
力 x-y-z 精度
5.5
N
力矩 x-y-z 范围
10
Nm
力矩 x-y-z 解析度
0.02
Nm
力矩 x-y-z 精度
0.60
Nm
工业协作移动机器人
标准型号
MiR250
机器人末端执行器
标准型号
nGripper90_CB4.0
+ nUC-S_CB4.0
机器人视觉定位
标准型号
n3DVision_CB2.0
末端执行器
行程
0-90mm
位置
0-4095/0-90mm
力
0-1000/2N-150N
夹持速度
≤55mm/秒
重复精度
±0.25mm
负载
六轴机器人负载
最大≤12.5KG,标准工具端≤10.5KG
移动机器人背负
≤150KG
末端执行器夹持负载
标准工具端≤4KG
配重
20KG
背负容器尺寸
标准最大
430mm x 550mm x1500mm(车体内)最大800mmx800mmx1500mm(超出车身)
重复定位精度
移动协作机器人地图一次定位
±30mm
VL-Marker标志二次定位
±5mm
视觉三次精定位相机 x-y-z
±1mm
六轴协作机器人
±0.05mm
速度和性能
运行时间
满负荷工作 6-8小时
最大速度
前进:2m/s
后退:0.5m/s
转弯半径
0.52m(围绕机器人中心自转,无背负容器情况下测量)
最小穿越间隙
2cm
离地高度
30mm
穿越最小宽度
无载具情况
1200mm
有效载荷的加速度限制
1.0m/s^2
导航方式
激光导航
自动绘制地图,激光导航,自动规划路径,自主运行,自动避障、可乘坐电梯、可与人混行
自重
自重(不包含载物工装)
160KG
电源
电池
1个Li-NMC,
48 V; 充电时间: 10% to 90% ≤ 1 小时
手动充电器
输入:
100-230 V ac, 50-60 Hz / 输出: 48 V, 最大 12 A
自动充电桩
长x宽x高
620mm
x 340mm x 200mm 充电板深度 480mm
重量
21KG
靠墙安装
与地面齐平
地面以上安装高度
地面到底部边缘4.5cm
电源输出
48V,最大电流40A
电源输入
电压
100-230V AC, 50-60Hz
安全相关
按键继电器激活自动充电、短路继电器、2个过热保护风扇,EN60335-2-29
传感器系统
SICK
激光扫描仪 S300 (2 个.)
360°
SICK Nanoscan3 无死角安全保护 ,SICK安全PLC,SICK安全继电器
3D 视觉Intel RealSenseTM(2个)
检测对象范围:机器人正面,2米内地面以上50mm-1800mm,2米外地面以上20mm-1800mm
超声波扫描仪(4个)
检测透明对象:例如玻璃门
双通道计程仪
双轮独立行程记录
加速度计、陀螺仪
加速度及方向检测
三次精定位定位相机
距离目标范围300mm-2000mm,目标尺寸大于20mmx20mm
安全标准
六轴协作机器人
17项先进的可调安全功能,包含肘部关节监控,符合ISO10218规范的远端控制,EN
ISO 13849-1, Cat.3, PL d, EN ISO 10218-1,通过TUV安全认证
移动协作机器人
通过工业EN
1525室内无人自动驾驶叉车安全认证, ANSI B56.5 ,EN12895,EN61000-6-2 & EN61000-6-4,安全等级PLd
cat.3 ,
CE认证
通过
UL认证
通过
洁净室等级
六轴机械臂
ISO Class Cleanroom 5,移动机器人 Clean Room certified: Yes
ESD认证
标准配置为非ESD,如需要请在订货时告知
工作环境
环境温度范围
0°C
到 50°C (湿度 10-90% 非冷凝)
IP防护等级
六轴协作机器人
IP54,示教器IP54,控制柜IP20,移动协作机器人IP20
地面平整度要求
≤5mm
爬坡能力
≤5°
通信
WiFi
双频无线
AC/G/N/B 支持2.4G或5G
I/O
16个数字输入,16个数字输出,1个模拟输入,2个模拟输出
API
nURHelper、nMiRHelper、nGripper90Helper、n4DVisionHelper,nCobot
API 2.0
控制系统
硬件(车载)
Intel
nUC,NONEAD nUC
软件
nCobotServer
& nCobotCenter
编程
nCobot
v2 拓德自主研发可视化编程系统,WiFi无线编程,简单易用。
调度系统
硬件
nUC
x 2, 非标配,需要额外购买
软件
MiR
Fleet 官方调度系统, NONEAD Call System,非标配,需要额外购买
上位机接口形式
Web
Service