| Released: 2022-12-19 | Reviewed: |
| Updated: 2022-12-19 | Author: 拓德科技 |
| Downloads: 13508 | Dev status: Release |
| Version: 3.15.8 | View: |
优傲机器人升级程序 3.15.8,支持UR3-CB3.X、UR5-CB3.X、UR10-CB3.X版本的优傲机器人升级,请确认UR是CB3或者CB3.1版本,CB3以下硬件版本升级可能导致不可预估的错误。
升级方法:
1、下载扩展名为urup的升级文件,复制到U盘根目录。
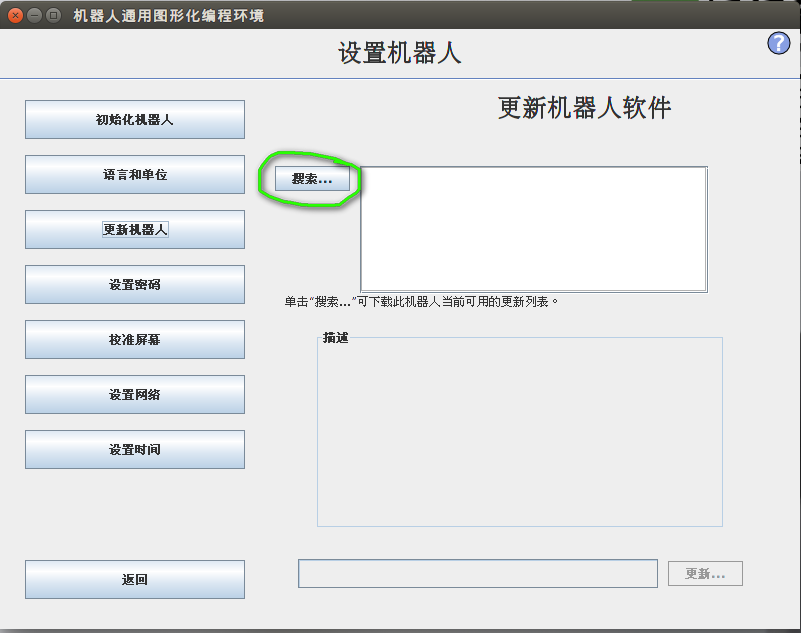
2、打开优傲机器人按照下图进入


3、将U盘插入示教器的USB接口,等待1-3秒后点击搜索按钮.
4、在框中会出现新的程序名称选中后,点击更新.....,系统将升级文件自动复制到UR机器人后,弹出是否要安装升级程序对话框,单击确定。
5、优傲机器人自动开始升级,等待数分钟后机器人会重启一次。
6、重启后点击启动按钮,机器人会自动更新固件,更新完毕后升级全部完成。
注意* 升级过程中切勿断电、手动重启或关机,否则会造成不可预估的后果,我们不承担任何因升级而导致的不可预估的风险。
优傲机器人各版本升级 Note RELEASE NOTE SOFTWARE VERSION 3.15.7.
update-3.5.4.10845.urup
3.5 的最终版本,后续3.6版本即将放出。
update_3.3.1.237优傲机器人实体升级程序文件,在升级过程中不可断电,否则可能导致机器人无法启动运行,升级有风险,操作需谨慎!!
3.3版本以上写的机器人程序,在3.2和3.1版本中是无法打开和使用的,请大家注意。