


技术参数
| 指定用途 | 为工业及物流应用打造的重型负载及托盘内部运输解决方案 |
| 类型 | 自主移动机器人 (AMR) |
| 颜色 | RAL 7011 / 铁灰色 |
| 产品设计寿命 | 5 年或 20 000 小时,以先到者为准 |
| 免责声明 | 相关规格可能因当地条件和应用设置的不同而有所不同 |
| 长度 | 1 350 mm | 53.1 in |
| 宽度 | 910 mm | 35.8 in |
| 高度 | 322 mm | 12.7 in |
| 重量 | 226 kg | 498.4 lbs |
| 离地净高 | 40 mm | 1.6 in |
| 负载表面 | 1 249 x 789 mm | 49.2 in x 31 in |
| 轮直径(驱动轮) | 200 mm | 7.9 in |
| 轮直径(脚轮) | 100 mm | 3.9 in |
| 安装顶部模块的尺寸 | 等于机器人占地面积。如果需要更大的顶部模块,请联系 MiR。 |
| 最大有效载荷 | 500 kg | 1 100 lbs |
| 有效载荷的占地面积 | 等于机器人占地面积。如果需要更大的有效载荷占地面积,请联系 MiR。 |
| 安装 MiR EU-/US-/货架举升器时的最大举升能力 | 500 kg | 1 100 lbs |
| 最大速度 | 2.0 m/s (7.2 km/h) | 6.6 ft/s (4.4 mph) |
| 工作走廊宽度 |
具有默认占地面积:2 200 mm | 86.6 in 具有最小占地面积:2000 mm | 78.7 in |
| 便于 90° 转弯的工作走廊宽度 |
使用默认设置:2 200 mm | 86.6 in 使用改进设置:2100 mm | 82.7 in |
| 便于 180° 转弯的工作走廊宽度 |
无有效载荷,具有默认占地面积:2 200 mm | 86.6 in 无有效载荷,具有最小占地面积:2 100 mm | 82.7 in |
| 便于两台机器人通过的工作走廊宽度 |
使用默认设置:4000 mm | 157.5 in 使用改进设置:3600 mm | 141.7 in |
| 转动宽度 |
使用默认设置:2600 mm | 102.4 in 使用改进设置:2500 mm | 98.4 in |
| 工作过道宽度 |
正常工作:1950 mm | 76.8 in 正常工作,相机筛选器设为高:1800 mm | 70.9 in 具有禁用的保护区域:1700 mm | 66.9 in |
| 绕障碍物/墙壁旋转直径无有效载荷 |
具有默认占地面积:2 200 mm | 86.6 in 具有最小占地面积:2 100 mm / 82.7 in |
| 充电器之间的最小距离 | 750 mm | 29.5 in,前提是机器人能够与墙壁成 80—100° 角度靠近充电器 |
| 不带有效载荷时的有效操作时间 | 15 h |
| 待机时间(机器人开启且空闲) | 26 h (100—0 %) |
| 可检测物体的最小尺寸 |
扫描仪:20 mm | 0.79 in(距离 1 000 mm | 39.4 in) 70 mm | 2.76 in(距离 2 500 mm | 98.4 in) |
| 停靠类型 | 正向和反向 |
| 最大倾斜/下降 | ± 5% @ 0.5 m/s |
| 已占用的托盘货架检测 | 是 |
| 电池类型 | 锂电池 |
| MiR Charge 48V 的充电时间 | 10%—90%:1 h |
| 有线充电器的充电时间 |
10%—90%:2 h(使用 20 A 充电器) 3.5 h(使用 12 A 充电器) |
| 充电选项 | MiR Charge 48V、电池充电器 48V 12A 和有线充电器 Lite 48V 3A |
| 充电器通信 | 机器人通过一个 CAN 接口与 MiR Charge 48V 进行通信。仅在机器人连接存在时,才会开始充电 |
| 充电电流, MiR Charge 48V | 最高 40 A,取决于临近充电周期结束时的电池温度和恒定电压下降。 |
| 充电电流,有线充电器 | 12 A 或 3 A |
| 电池重量 | 14.3 kg | 31 lbs |
| 电池尺寸 | 300 mm 长 × 300 mm 宽 × 107 mm 高 | 11.8 in 长 × 11.8 in 宽 × 4.2 in 高 |
| 完整充电周期的数量 | 至少 1000 个周期 |
| 电池电压 | 48 V 额定电压 |
| 电池容量 | 2 kWh(48 V 时为 41.6 Ah) |
| 为空电池充电 | 仅可使用有线充电器。若要连接至 MiR Charge 48V,机器人至少需要具有 3%(或相当于运行 10 min)的电池容量。 |
| 有线充电器 | 在使用有线充电器充电时,机器人会进入急停状态。 |
| 环境 | 仅室内使用 |
| 操作环境温度范围 | 5°C—40°C | 41°F—104°F,符合 ISO3691-4 第 4.1.2 节 |
| 存储环境温度范围 | -10°C—60°C | 14°F—140°F |
| 湿度 | 10-95% 无冷凝 |
| IP 等级 | IP21 |
| 地面上的水迹 | 可以承受驾驶通过地面上最大深度为 4 mm 的小水坑。应对潮湿地面执行风险评估,否则制动距离可能会受到影响。 |
| 最大高度 | 2 000 m | 6 561 ft |
| EMC | EN61000-6-2、EN61000-6-4、(EN12895) |
| 工业车辆安全标准 | CE、EN1525、ANSI B56.5、ISO3691-4、RIA15.08、ISO13849-1 |
| 安全功能 | 五类安全功能,符合 ISO 13849-1。如果触发安全功能,MiR1000 将停止。 |
| 人员检测安全功能 | 当检测到障碍物或人与机器人距离过近时触发 |
| 急停 | 按下急停按钮触发 |
| 防超速 | 防止机器人行驶速度超出预定义的安全限制 |
| 机器人界面中的手动控制 | 基于令牌,用于访问手动控制的系统。机器人一次仅发出一个令牌。 |
| WiFi(路由器) | 2.4 GHz 802.11 g/n, 5 GHz 802.11 a/n/ac。内部计算机:802.11 a/b/g/n/ac。 |
| WiFi(内置 PC) | 双频无线 A/B/G/N/AC |
| WiFi 连接 | WiFi 适配器:2.4 Ghz 和 5 GHz,2 个内置天线。 |
| I/O 连接 | 4 个数字输入端口,4 个数字输出端口,1 个以太网端口 |
| 通讯协议 | REST,Modbus |
| 顶部模块的电源 | M23 插头,6p。2 x 48 V / 20 A 安全电源,1 x 24 V / 2 A 始终开启 |
| SICK 安全激光扫描仪 | 双 microScan3(前后)为机器人提供 360° 视觉保护 |
| 3D 相机 |
2 台 Intel RealSense™ D435 3D 相机。 视场高度: 1 700 mm | 66.9 in 机器人前方的视场距离:950 mm | 37.4 in 视场水平角度:114° 机器人前方的视场最小距离(用于地面视图):250 mm | 9.8 in |
| 接近传感器 | 8 个 |
| 声音 | 喇叭 |
| 状态灯 | LED 灯带 |
| 信号灯 | 8 个,每个角 2 个 |
| 维护 | 机器人的四块侧面维护盖板 |
| 保养周期 | 6 个月或根据用户指南 |
 经济高效,使用便捷,实现内部重物与托盘运输自动化
经济高效,使用便捷,实现内部重物与托盘运输自动化高效、快速运输有效负载高达500公斤 克服内部物流瓶颈,提高生产率 现有设施无需作任何修改
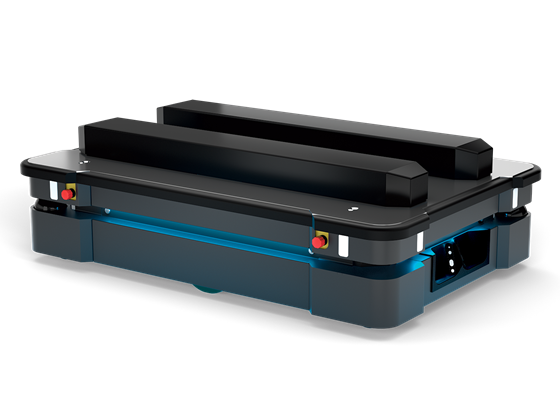
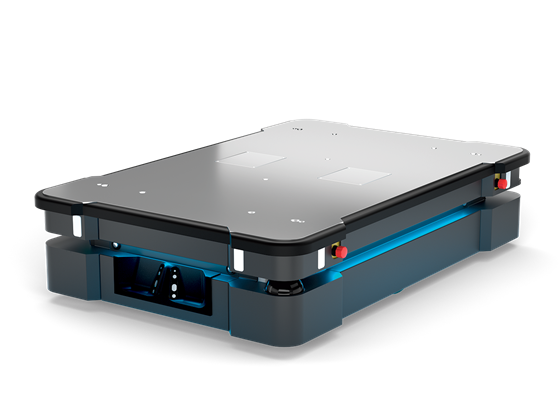
MiR500 专为在各行各业中实现托盘和重型负载自动运输而设计,举升能力强、运行速度快且设计稳健的协作式自主移动机器人。
安全、高效地运输
协作式 MiR500 能够在人员和物理障碍物之间安全地穿梭。凭借先进的技术和复杂的软件,该机器人能够自动导航,从而检测前往目的地的最佳路线。当遇到障碍物时,机器人将会自动重新规划路线,从而避免物流流程发生成本高昂的积压。
MiR500 配备可提供 360 度扫描视角的最新激光扫描技术,可确保优化安全性。MiR500 的 3D 摄像头可以检测托盘且扫描范围为地面3cm至2米,另外,该机器人还能够识别并规避地面上的坑洞。
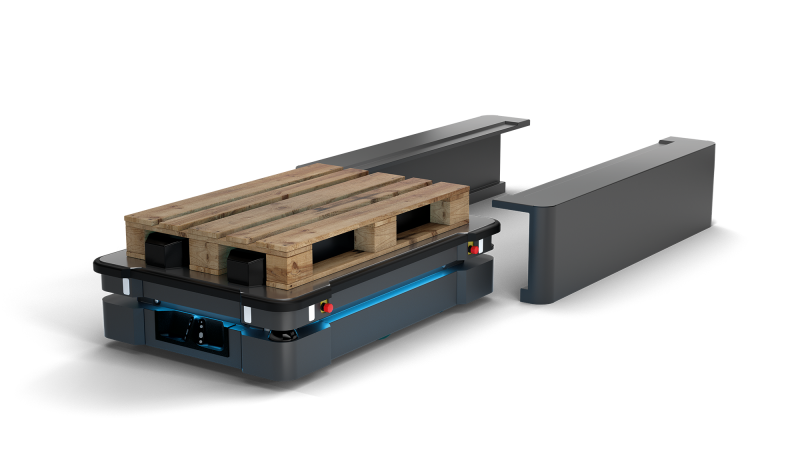
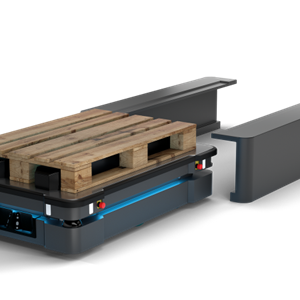
不更改工厂布局的情况下优化托盘运输
借助 MiR500 托盘举升器,MiR500 能够自动拾取、运输并卸下托盘,从而释放企业的劳动力以用于完成更有价值的任务。MiR500 的运行速度为 2 m/秒(7.2 km/小时),能够显著优化运输时间。MiR500 采用复杂的导航软件取代传统的线路、磁铁或二维码,因此操作时无需更改工厂布局。您只需将工厂的 CAD 文件下载至机器人中,或者使用其激光扫描仪创建工厂地图,机器人便可以实现自动导航,从而保证快速且以具有成本效益的方式为您实施自动化运输流程。
为工业应用打造的稳健型机器人
MiR500 满足 ISO/EN 13849 标准,并符合针对重型及轻型工业环境的 EMC 要求。MiR500 专为工业应用而设计:其外表部件都得到了进一步优化增强,能够在行经颠簸路段或小水洼时有效保护货物(例如避免货物掉落)。
高度的用户友好性和灵活性
MiR500在所有层面都提供高度的用户友好性,让您从一开始便能够获得全面掌控。您可在智能手机、平板电脑或 PC 上通过直观的 MiR 机器人界面控制 MiR500,且无需任何编程基础也可对其进行编程。该机器人还可集成至 ERP 系统中,以便您打造全自动解决方案。
此外,机器人的各种顶部模块的集成也非常简单、快速。MiR500 可以轻松配置托盘货叉、传送带、机器人手臂或任何其他装置。