

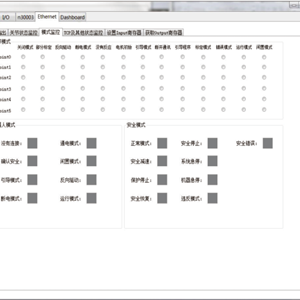


Running
Robotmode
Popup
Close popup
Add to log
Is program saved
Program state
Polyscope version
Power on
Power off
Brake Release
Safetymode
Unlock protective stop
Close safety popup
Restart safety
Load installation
2017-12-27
1.4.12271
1. 兼容UR机器人软件3.5版本30003数据包
2017-11-7
1.4.11071
1.修复30003端口数据获取异常问题
2.修改可能导致EthernetIP数据获取异常的问题
2017-7-27
1.4.07271
1. 修改CreateUR方法,增加参数优傲型号(int type),区分优傲型号
2. 修改方法GetURList,修改原先返回格式“名称;IP”为“名称;IP;类型”
3. 针对UR3类型,修改n30003Entity类型,增加第6轴目标位置旋转圈数参数(JOT_TP_5_Round)和第6轴实际位置旋转圈数参数(JOT_RP_5_Round)
4. 针对UR3类型,修改nEthernetT2OEntity类型,增加第6轴位置旋转圈数参数(Joint_Pos_5_Round)
2017-6-30
1.3.06301
1.修改拼写错误(Conncet -> Connect)
2.修改了调用ClearUR和ClearAllUR方法后没有关闭处于打开状态的端口,现在调用这两个方法对UR进行清理时会释放这些端口
3.修改了一些会引起调用已释放对象的错误2017-4-14
1.3.04141
1. 更新至1.3.04141版本
2. 修复由30003端口异常断开导致的数据丢失且无法再次获取问题
3. 增加判断当前的端口是否断开连接,使得返回的连接状态更为准确
2016-11-02
1.2.11021
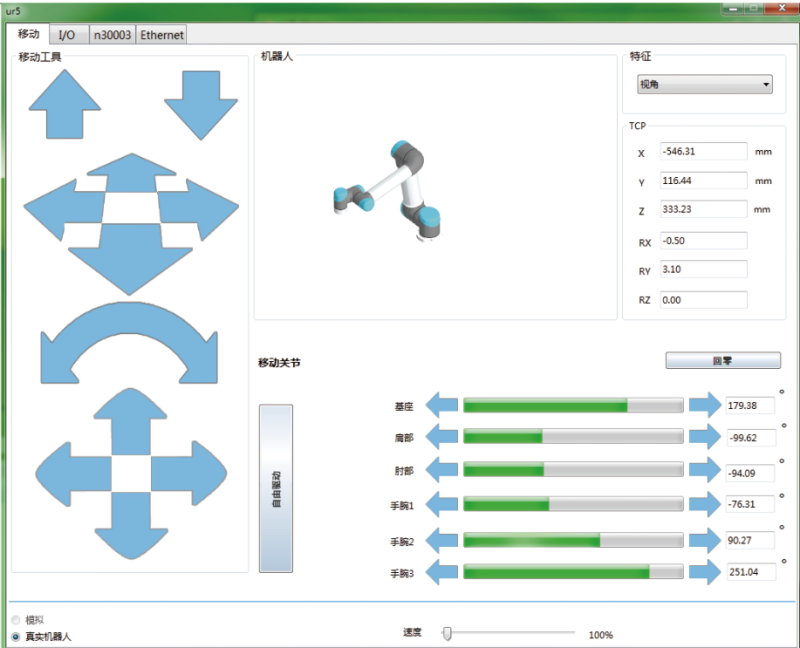
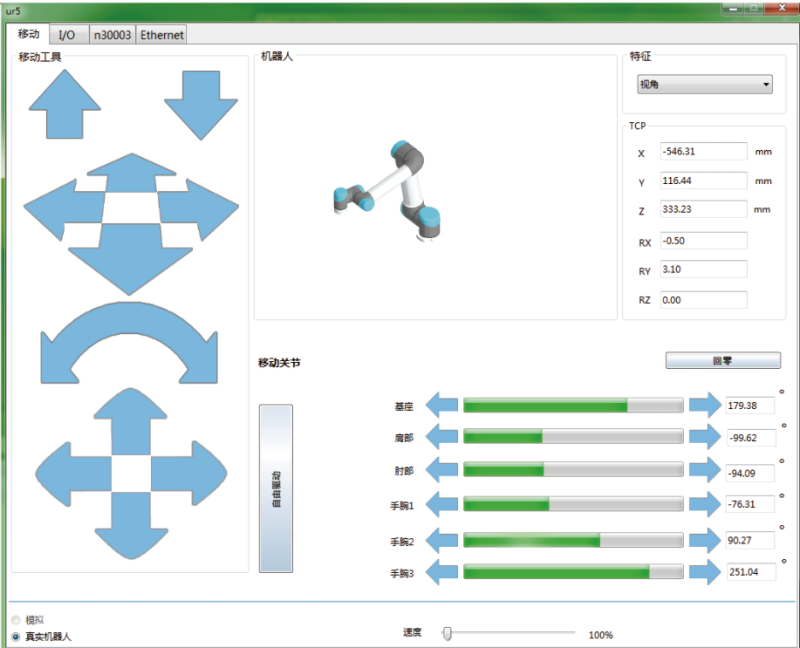
1.添加通过30003端口移动机器人TCP的功能
2.添加通过30003端口移动机器人关节的功能
3.修改n30003Entity.RUN_TIME的单位为秒(s)
2016-10-28
1.2.10281
1.修改Ethernet连接下模拟输入/输出电流的单位转化问题
2016-10-21
1.2.10211
1. 发布正式版本,添加硬件狗加密功能
2016-10-17
1.1.10171
1. 修改Ethernet部分中的Connect方法,新增Ethernet连接方式2. 在Ethernet部分中新增GetEthernetConnectionID方法
3. 修改错误信息列表,新增错误信息
4. 限制UR机器人的连接数量上限为6
2016-9-28
1.1.09281
1. 修改部分Bug
2. 修改文档
2016-9-12
1.1.09121
1.修改部分Bug
2.新增Ethernet功能模块
升级文档:
1 版本变更历史
2016-9-12
1.1.09121
Initial Version of Document
2016-9-28
1.1.09281
Update&Change
2016-10-17
1.1.10171
Add new function
2016-10-21
1.2.10211
Release official version
2016-10-28
1.2.10281
Bug verify
2016-11-02
1.2.11021
Add new functin
2017-4-14
1.3.04141
更新优化,修改bug
2017-6-30
1.3.06301
修改已知bug
2017-7-27
1.4.07271
增加UR类型,更新功能
2017-11-7
1.4.11071
修复已知bug
2017-12-27
1.4.12271
兼容UR机器人软件3.5版本30003数据包
2018-10-12
1.5.10121
兼容UR G3系列3.7版本及e系列5.1版本
Dashboard新增功能
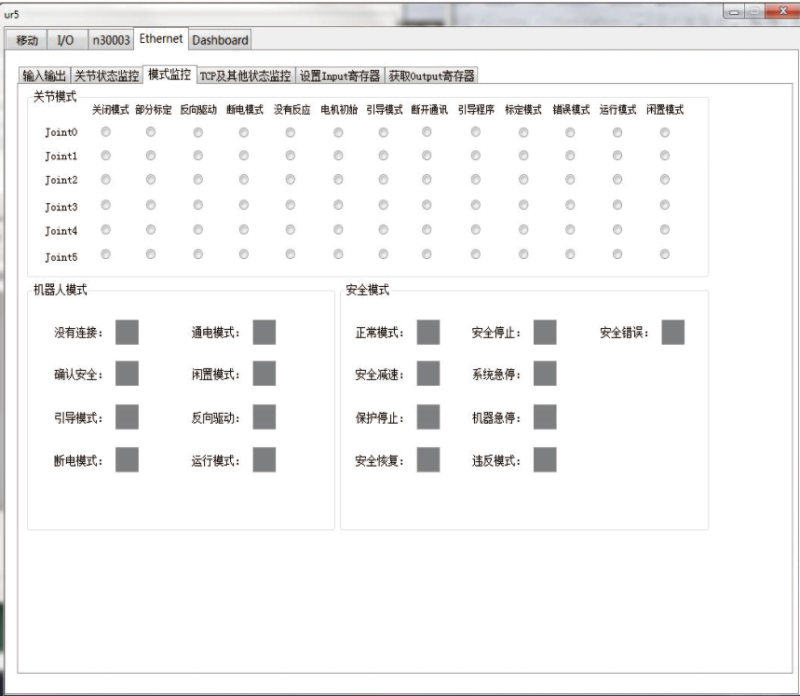
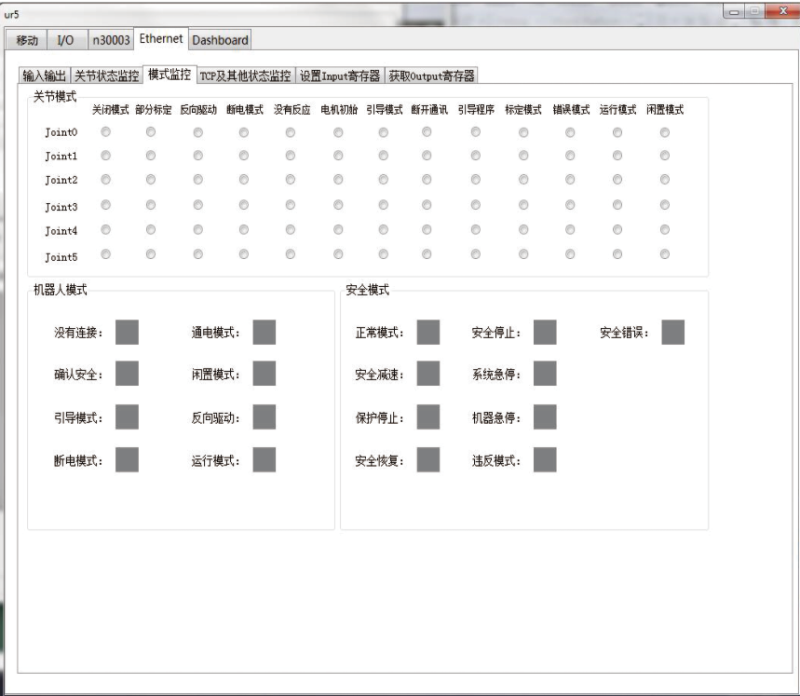
nURHelper.dll是由C#编写、基于Microsoft .Net Framework 4.0的优傲机器人上位机控制类库。其中包含了与优傲机器人的连接,获取优傲机器人数据及控制优傲机器人等功能。通过使用本类库可以实现与多台优傲机器人连接,并操控优傲机器人。类库中包含了30003端口、ModbusTCP、EthernetIP、Dashboard等多种优傲机器人接口的丰富功能,使用该类库可以降低UR机器人项目开发的难度,缩短项目开发周期。标准nUR_SDK可同时管理6台UR机器人。