













技术参数
| nUC-M_CB4.0 | nUC-S_CB4.0 | |
| ICS CODE | NH0045 | NH0046 |
| Interface | ||
| Digital Input (24VDC Max 500mA PNP) | 4 | 8 |
| Digital Output(24VDC Max 500mA NPN) | 4 | 8 |
| Safety Input (24VDC Max 500mA PNP) | 2 | 4 |
| Network 10M/100M | 1 | |
| COM | 1 | |
| TF Card | 8G | |
| Special peripheral interfaces | 1 (RS485, DI1/DO1) | |
| Management Mode | Web, Client | |
| Communication Protocol | Modbus-TCP, Ethernet/IP | |
| Communication Protocol options with controller | DeviceNet , TCP/IP Socket | |
| MCU Type | ST CORTEX-M7 | |
| IP Rating | 30 | |
| Power Supply [VDC] | 24 to 48 | |
| Maximum Power [W] | 100 | |
| Status LED | Power, Run,Data,Error,Input,Output | |
| Ambient Temperature [℃] | -10 to +55 | |
| Feedback | Position, Velocity, Force, Trajectory, Temperature, Input Voltage, etc. | |
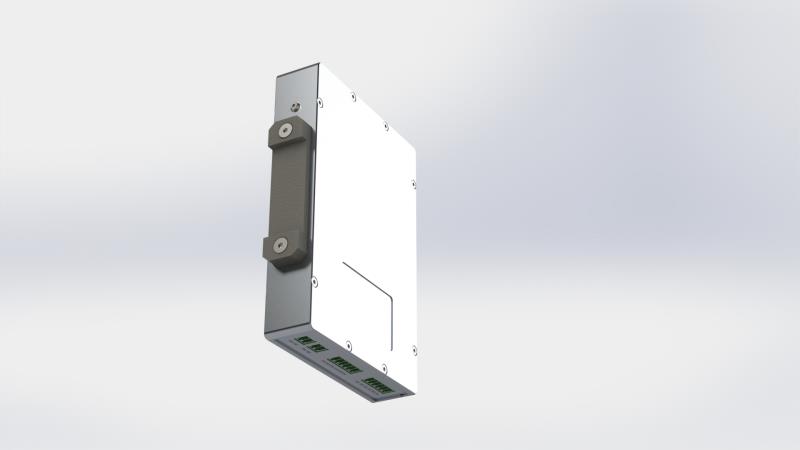
拓德科技为MiR移动机器人定制研发的执行控制器,可以使用串口或以太网方式与MiR通信。
两种型号性能:
nUC-M CB4.0

该设备自动映射MiR输入寄存器0-3,输出寄存器0-3,对应拓德MiR移动机器人执行器上的DI0-DI3和DO0-DO3,当程序改变MiR输出寄存器值时,执行器对应的输出也会同步打开用于控制小车顶部机构,当执行器输入传感器值改变时,同步也会映射到MiR输入寄存器对应值得变化。
nUC-S CB4.0

该设备自动映射MiR输入寄存器0-7,输出寄存器0-7,对应拓德MiR移动机器人执行器上的DI0-DI7和DO0-DO7,当程序改变MiR输出寄存器值时,执行器对应的输出也会同步打开用于控制小车顶部机构,当执行器输入传感器值改变时,同步也会映射到MiR输入寄存器对应值得变化。
以上两个产品均采用Web管理方式,配置和使用非常简单,对于实时性要求高的应用建议使用串口通信,实时性不做要求的应用可以使用网络通信,简单易用,设备供电系统转为MiR电池设计支持24V-48V直流电,增加了反接保护,稳压功能,可以直接接在MiR电池上使用,稳定可靠。