软件
软件
 |
优傲机器人魔法文件 UR Magic版本号:v3.15 - v5.11 | 下载 |
| 优傲机器人魔法文件 UR Magic 全系列通用 |
 |
nGripper90_CB4.5 随机U盘资料版本号:4.5 | 下载 |
| 201903131_nGripper90_CB4.5_随包装U盘数据集 下载 604M |
 |
nGripper90 软件配置工具 for win版本号:v4.0 | 下载 |
| NONEAD Universal Controller Tools用于配置拓德通用控制器的PC上位机程序nGripper90 SDKnGper90Ctrl.dll使用说明 v1.0.06041编程语言: C# 支持二次开发,PC机直接通过nGper90Ctrl.dll 直接控制 nGripper90。 |
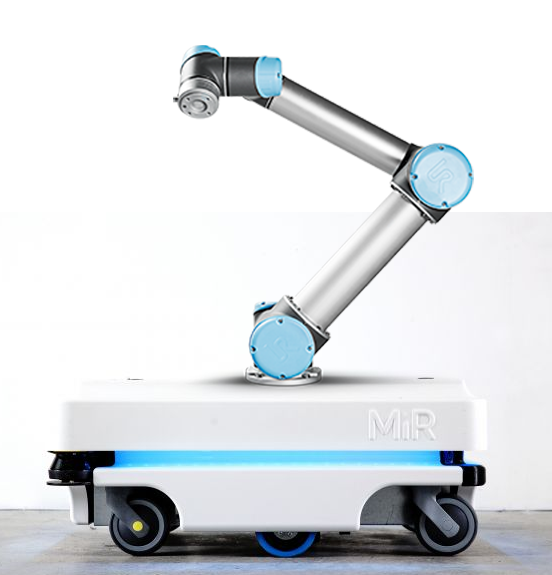 |
协作工业机器人模拟器_优傲+MiR模拟器 VB版版本号:URSim v3.4.1 & MiRSim v1.6.3 | 下载 |
| UR5 机器人 — 可处理高达 5 千克(11 磅)的自动化作业— 延伸半径范围达 850 毫米(33.5 英寸)- 回报时间快轻巧、灵活的优傲 UR5 可为您自动处理有效载荷达 5 千克的重复性危险作业。UR5 可完美胜任轻量级协作流程(如抓取、放置和测试)。UR5 的工作半径达 850 毫米,让一… |
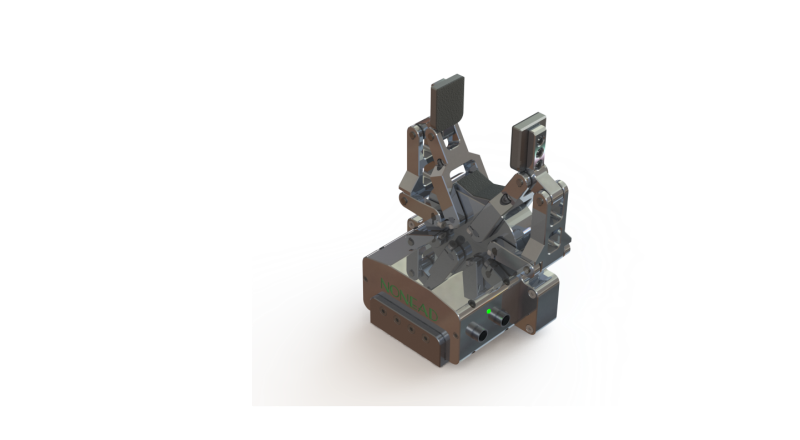 |
UR机器人控制拓德2指电控柔性工业机器人末端执行器示例程序版本号: | 下载 |
| 用于UR机器人控制拓德2指电控柔性工业机器人末端执行器 |
 |
UR优傲机器人64位模拟器 Ubuntu 16.04 URSim 3.3.4 VirtualBox版本号:Ubuntu 16.04 URSim 3.3.4 VirtualBox | 下载 |
| 基于Ubuntu 16.04中文版优傲机器人编程环境 URSim 3.3.4,虚拟机采用免费的甲骨文Oracle_VM_VirtualBox,操作系统为64位中文版Ubuntulinux version 16.04,且已安装并调试完成优傲机器人最新正式版本3.3.4,安装好后直接运行即可使用,用户可以通过该系统学习优傲机器人,也可… |
 |
Ubuntu 16.04 & URSim3.3.4 & ROS 开发试验平台版本号:Kinetic Kame | 下载 |
| ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。拓德科技应广大爱好者要求,在Ubuntu 16.04 LTS基础上… |
 |
UR优傲机器人32位模拟器 URSim 3.3.1.237 ubuntu 15.10 x86版本号:3.3.1.237 | 下载 |
| 附件为中国本地化虚拟机文件,需要安装VMware Workstation Pro 12.0 以上版本方可运行,操作系统为32位中文版Ubuntu linux version 15.10,且已安装并调试完成优傲机器人最新正式版本3.3.1.237,安装好后直接运行即可使用,用户可以通过该系统学习优傲机器人,也可通过该系统 |
 |
优傲机器人模拟器三合一 URSim 1.8&3.0&3.1Beta版本号:v1.8&v3.0&v3.1Beta | 下载 |
| 附件为虚拟机文件,需要安装VMware Workstation 9.0 以上版本方可运行,附件的操作系统是中文版Ubuntu linux version 10.04,且已安装并调试完成URSim-1.8.14035,URSim-3.0.16471,URSim-3.1.16524三个版本的优傲虚拟环境,安装好后直接运行即可使用,注* 三个版本虚拟环境不 |
 |
拓德远程管理软件 nRemoter for IT版本号:V1.01.11071 | 下载 |
| nonead Remoter简称nRemoter,是一款实用的应用程序,它允许您从一个中心位置管理联网环境(包括工作站、服务器和网络设备)中的支持RDP、VNC、SSH、HTTP、HTTPS协议的网络设备。借助nRemoter的内置管理功能,您可以监控远程计算机上、管理远程设备,并快速应对新的问题和威胁 |